Camera Calibration¶
scikit-surgerycalibration provides a range of functions/classes mono, stereo and hand-eye calibration.
The Jupyter notebook for this page can be found in the docs/tutorials folder of the code repository.
Setting up paths and virtual environment
cd $HOME/repositories/Scikit-Surgery/scikit-surgerycalibration export PYTHONPATH=$HOME/repositories/Scikit-Surgery/scikit-surgerycalibration conda activate scikit-surgerycalibrationVE
Required modules¶
This tutorial requires numpy, opencv-contib-python, scikit-surgeryimage, scikit-surgerycalibration, and matplotlib (for inline image plotting).
[1]:
import cv2
import numpy as np
import matplotlib.pyplot as plt
import sksurgeryimage.calibration.chessboard_point_detector as cpd
import sksurgerycalibration.video.video_calibration_driver_mono as mc
Chessboard Calibration¶
The calibrator can be used with any of the point detectors available in scikit-surgeryimage.
In this example, we will use the chessboard detector, see the Point Detectors Tutorial for some examples of other options.
We will use this 14x10 chessboard pattern for calibration. 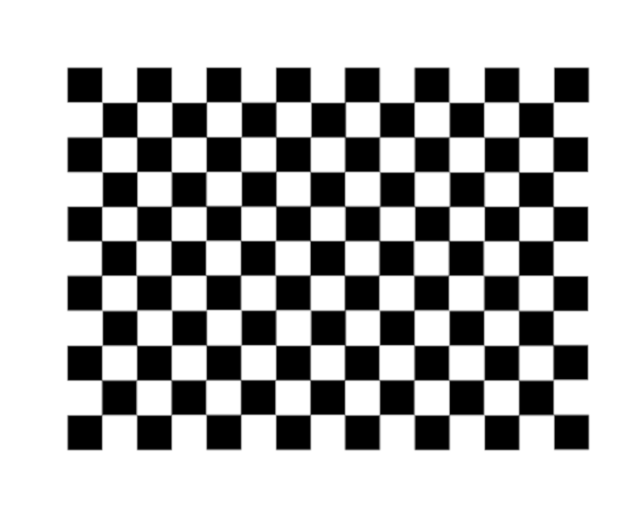
You can either print it out, or display it on a mobile phone. If printed, the square size is 6mm, you will have to measure/estimate the size if displayed on a phone screen.
Initial setup¶
[2]:
chessboard_corners = (14, 10)
min_points_to_detect = chessboard_corners[0] * chessboard_corners[1]
square_size_mm = 6 # Change as appropriate if displayed on phone
video_source = cv2.VideoCapture(0)
detector = cpd.ChessboardPointDetector(chessboard_corners, square_size_mm)
calibrator = mc.MonoVideoCalibrationDriver(detector, min_points_to_detect)
Capture some frames¶
If you hold the chessboard in view of your camera, and run the below cell repeatedly, it will grab some frames. At least 2 frames are needed for a calibration, but in general the more frames, the better the calibration.
[5]:
# Read a frame and detect points
_, frame = video_source.read()
number_of_points = calibrator.grab_data(frame)
# Draw chessboard points on frame
if number_of_points > 0:
img_pts = calibrator.video_data.image_points_arrays[-1]
###print(img_pts.shape)##(140, 1, 2)
frame = cv2.drawChessboardCorners(frame,
chessboard_corners,
img_pts,
number_of_points)
plt.imshow(frame)
plt.show()
# Print some details
number_of_views = calibrator.get_number_of_views()
print(f"Detected {number_of_points} corners")
print(f"{number_of_views} frames captured")
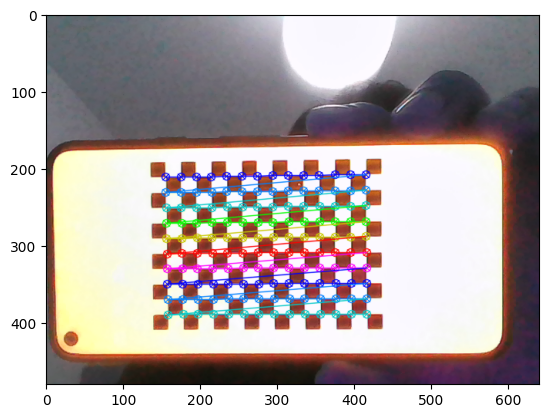
Detected 140 corners
3 frames captured
Perform calibration¶
[6]:
if number_of_views > 1:
proj_err, params = calibrator.calibrate()
#proj_err, recon_err, params = calibrator.calibrate()
print(f'Reprojection (2D) error is: \n {proj_err}')
#print(f'Reprojection (3D) error is: \n {recon_err}')
print(f'Intrinsics are: \n {params.camera_matrix}')
print(f'Distortion matrix is: \n {params.dist_coeffs}')
Reprojection (2D) error is:
0.19281401614557028
Intrinsics are:
[[809.69585633 0. 432.93998965]
[ 0. 802.69795671 291.847329 ]
[ 0. 0. 1. ]]
Distortion matrix is:
[[-0.06609416 -0.10402796 0.00859668 0.00367779 2.34223261]]
[7]:
video_source.release()
Dot Calibration¶
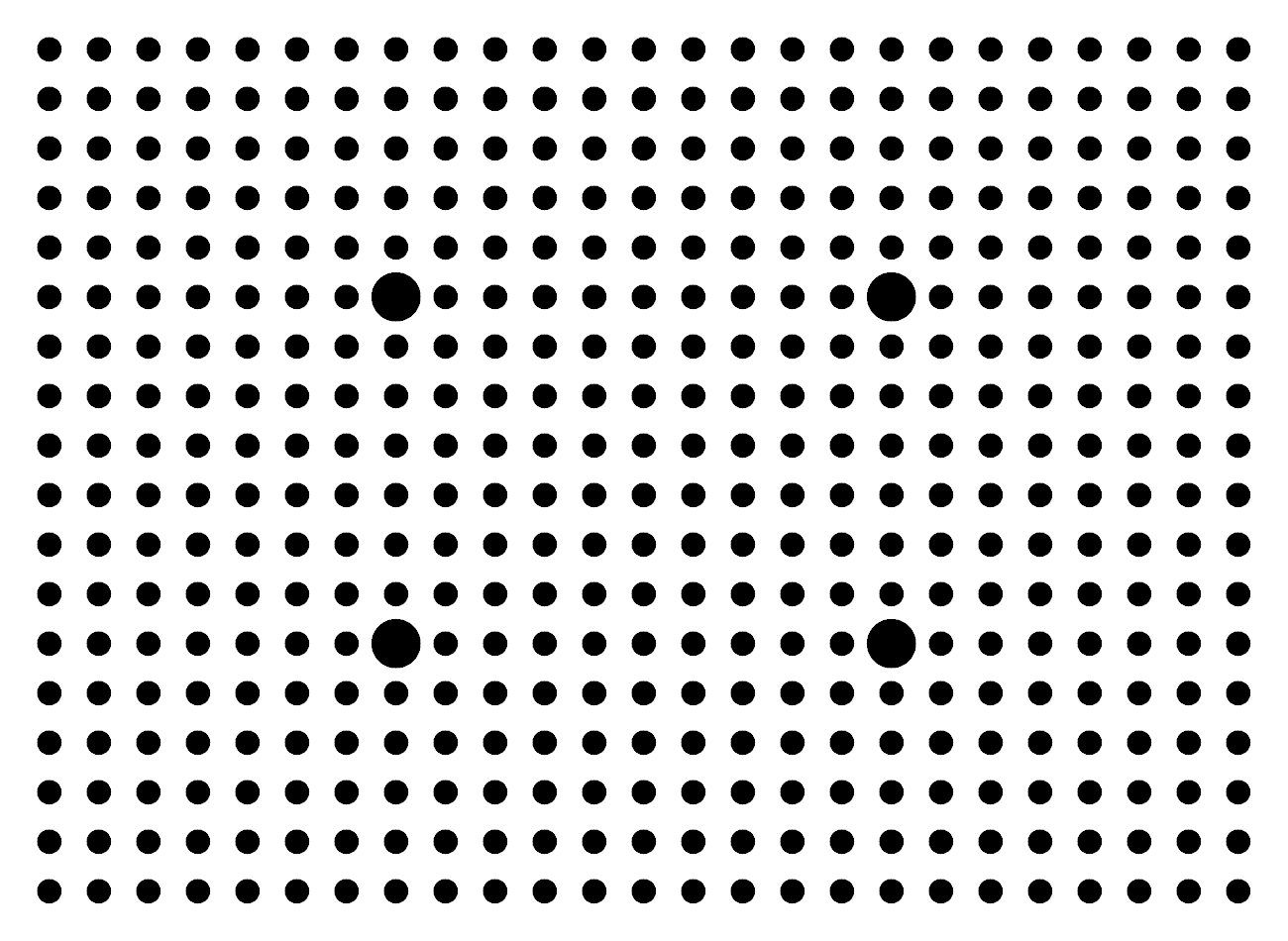
We will use this dot pattern. 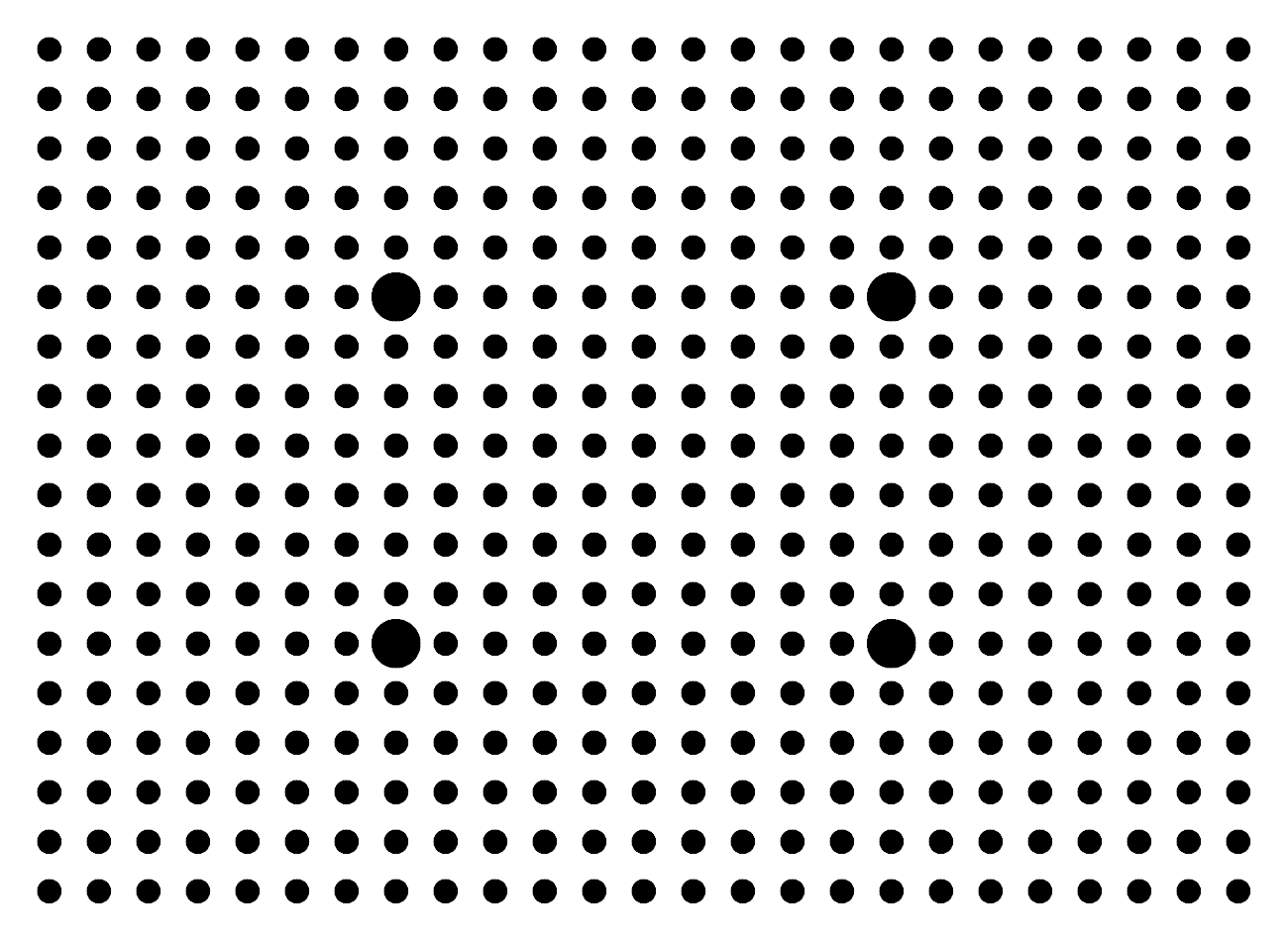
{kind=link}
Due to the relatively small size of the dots, performance when displayed on a phone screen may vary.
[8]:
import cv2
import numpy as np
import matplotlib.pyplot as plt
import sksurgeryimage.calibration.dotty_grid_point_detector as dpd
import sksurgerycalibration.video.video_calibration_driver_mono as mc
Initial setup for dot detector¶
[9]:
number_of_dots = [18, 25]
pixels_per_mm = 80
dot_separation = 5
# Don't need to capture all dots for calibration to work
min_points_to_detect = (number_of_dots[0] / number_of_dots[1]) / 2
model_points = dpd.get_model_points(number_of_dots,
pixels_per_mm,
dot_separation)
# Location of the large dots in the pattern
fiducial_indexes = [132, 142, 307, 317]
# Image size
reference_image_size = [1900, 2600]
# data in scikit-surgerycalibration/tests/data/dot_calib
left_intrinsic_matrix = np.loadtxt("../../tests/data/dot_calib/calib.left.intrinsics.txt")
left_distortion_matrix = np.loadtxt("../../tests/data/dot_calib/calib.left.distortion.txt")
video_source = cv2.VideoCapture(0)
detector = \
dpd.DottyGridPointDetector(
model_points,
fiducial_indexes,
left_intrinsic_matrix,
left_distortion_matrix,
reference_image_size=(reference_image_size[1],
reference_image_size[0])
)
calibrator = mc.MonoVideoCalibrationDriver(detector, min_points_to_detect)
Capture some frames¶
If you hold the chessboard in view of your camera, and run the below cell repeatedly, it will grab some frames. At least 2 frames are needed for a calibration, but in general the more frames, the better the calibration.
[12]:
# Read a frame and detect points
_, frame = video_source.read()
number_of_points = calibrator.grab_data(frame)
if number_of_points > 0:
img_pts = calibrator.video_data.image_points_arrays[-1]
###print(img_pts.shape)##(448, 1, 2)
# Draw detected points on frame
for point in img_pts:
frame = cv2.circle(frame, ( int(point[0,0]), int(point[0,1])), 5, (255, 0 ,0), -1)
plt.imshow(frame)
plt.show()
# Print some details
number_of_views = calibrator.get_number_of_views()
print(f"Detected {number_of_points} points")
print(f"{number_of_views} frames captured")
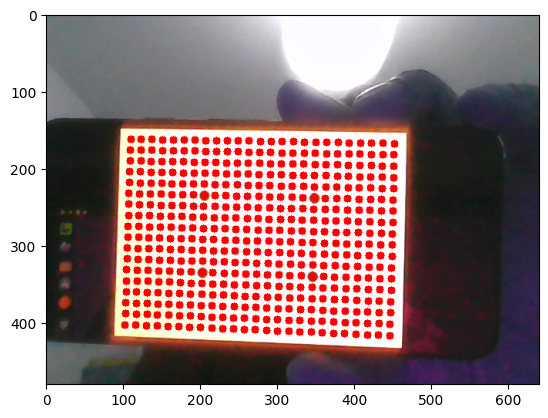
Detected 450 points
3 frames captured
Release video_source¶
[13]:
video_source.release()
Perform Calibration¶
[14]:
if number_of_views > 1:
proj_err, params = calibrator.calibrate()
#proj_err, recon_err, params = calibrator.calibrate()
print(f'Reprojection (2D) error is: \n {proj_err}')
#print(f'Reprojection (3D) error is: \n {recon_err}')
print(f'Intrinsics are: \n {params.camera_matrix}')
print(f'Distortion matrix is: \n {params.dist_coeffs}')
Reprojection (2D) error is:
0.08160305101574904
Intrinsics are:
[[546.86680246 0. 342.68154282]
[ 0. 545.55158144 232.75969187]
[ 0. 0. 1. ]]
Distortion matrix is:
[[-0.05469762 0.2762558 0.00113643 0.00038568 -0.35911484]]
Stereo Calibration¶
Stereo calibration works in the same way as mono calibration, except with two detectors and two images:
import sksurgerycalibration.video.video_calibration_driver_stereo as sc
# Define detectors
calibrator = sc.StereoVideoCalibrationDriver(left_detector,
right_detector,
min_points)
# Acquire images
number_of_points = calibrator.grab(left_image, right_image)
[ ]: